

概述:开发了适用于静力通用、频率分析和动力隐式(固定增量步长和自适应增量步长均可)的三维八节点线性UEL,即ABAQUS自带的C3D8单元,该UEL考虑了B-BAR修正,避免体积锁死。采用编写的UEL,分别设置了静力通用分析步、频率分析和动力隐式分析步,将计算结果与ABAQUS对比,位移、速度和加速度与ABAQUS均保持一致,说明该UEL复现了一小部分C3D8单元的计算功能。
(一)模型信息
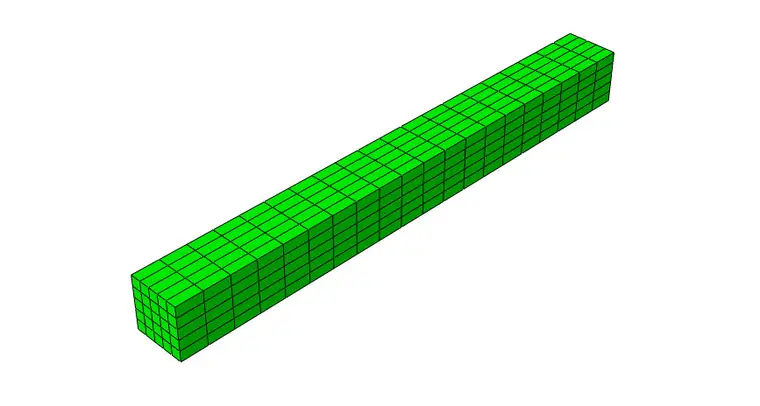
悬臂梁尺寸:10x10x100,密度1e10,密度200,泊松比0.25。不设置单位,纯验证。
网格如下图:,每个单元尺寸为:2x2x5。
(二)静力分析
边界条件如下图:
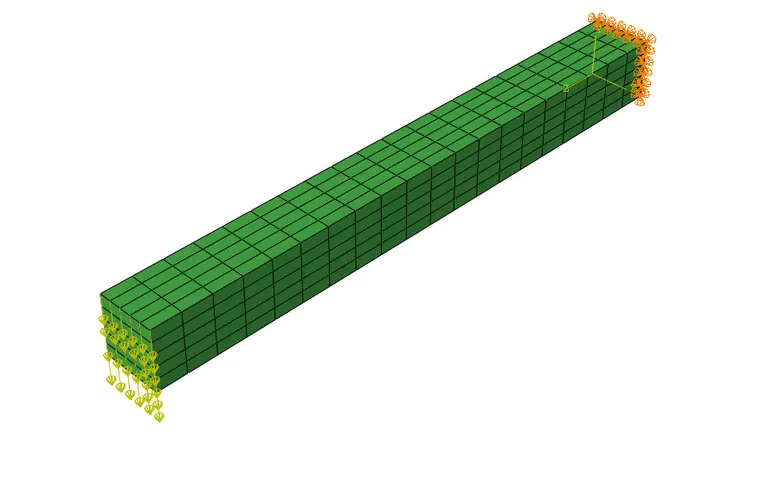
荷载大小为:1e6,采用固定增量步长,计算总时长为10(静力计算中计算时长无意义,仅为验证设置),增量步长为0.01,总增量步数为1000。
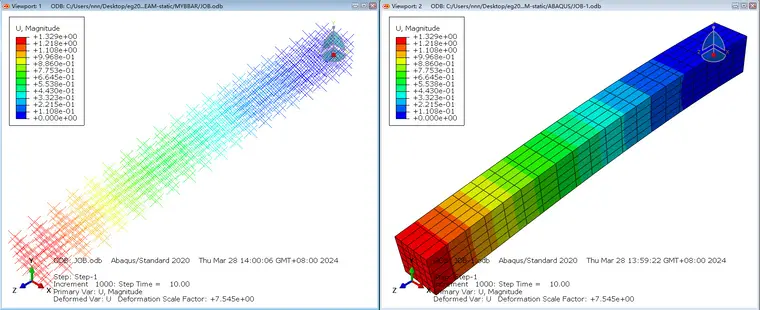
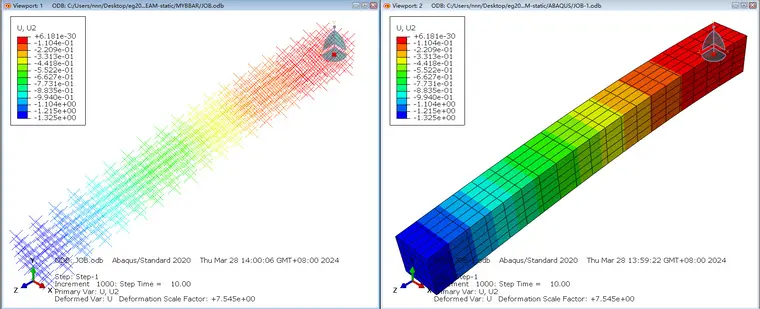
总位移云图如下图:
加载向(U2、Y向)位移云图如下图:
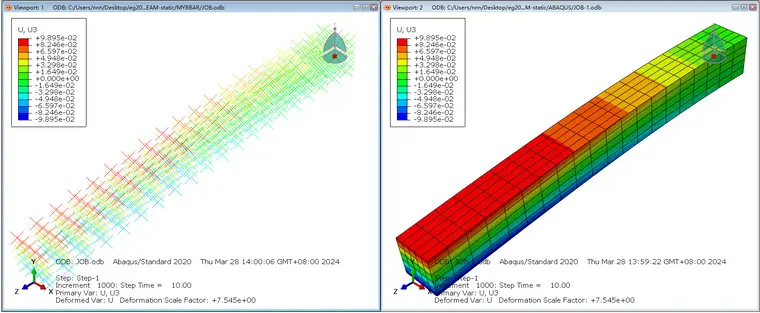
梁向(U3,z向)位移云图如下图:
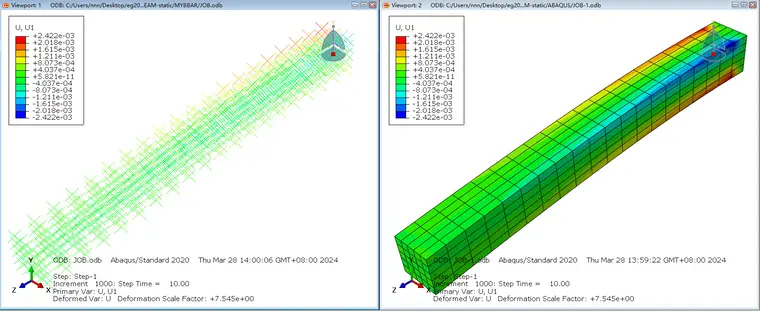
U1,x向位移云图如下图:
悬臂端角点加载向位移-荷载历程如下图:
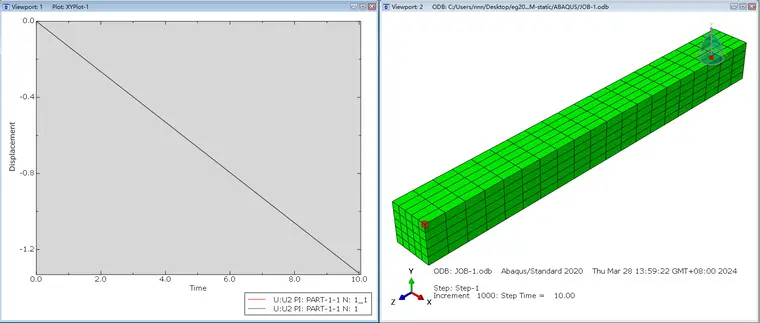
注意这里的时间并没有物理意义,在静力通用分析步中仅仅是增量步的计算意义。
(三)频率分析
边界条件,梁一端固定。计算前100阶频率信息。
1~41
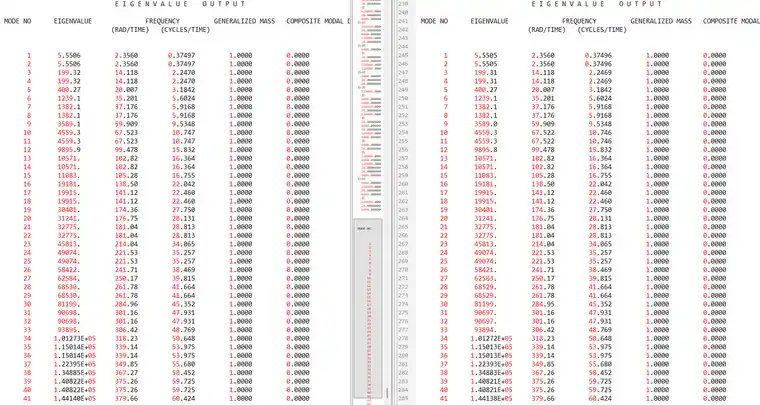
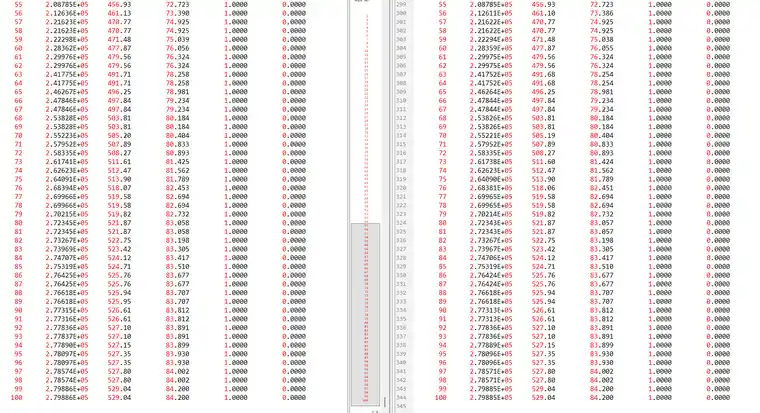
41~56

55~100
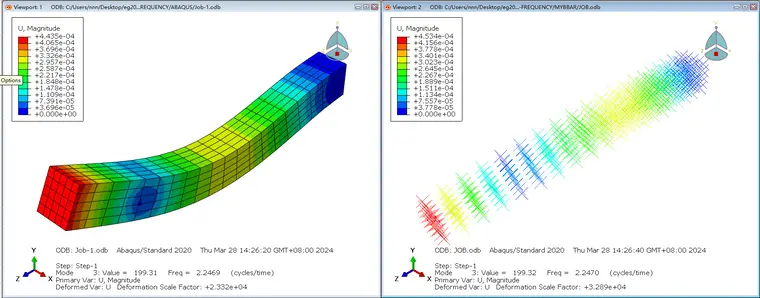
第1阶振型如下图:
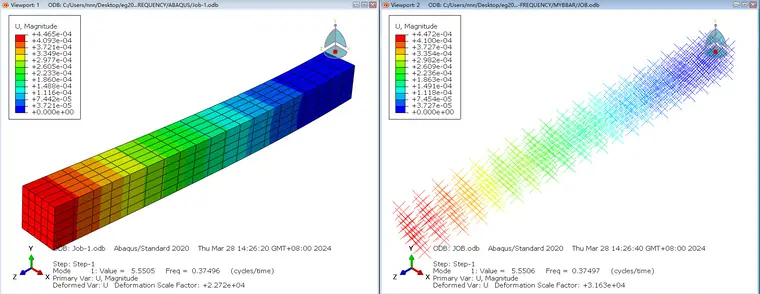
第2阶振型如下图:
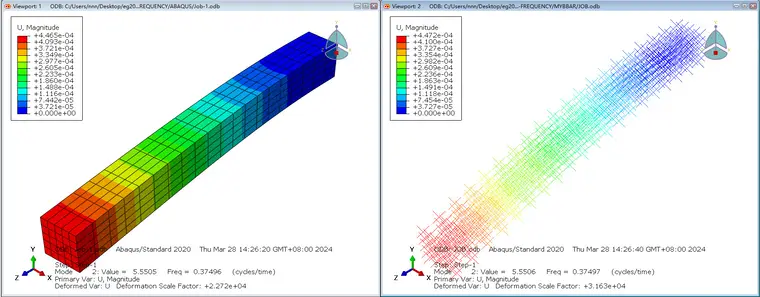
第3阶振型如下图:
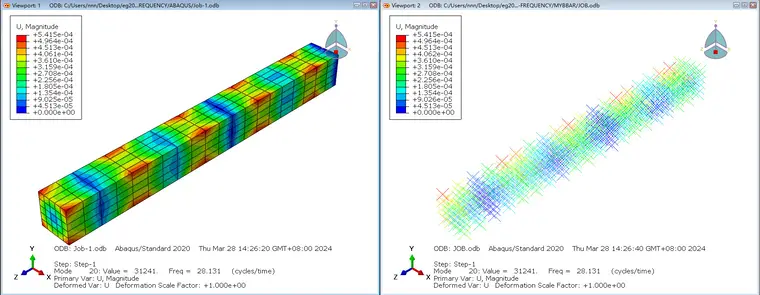
第20阶振型如下图:
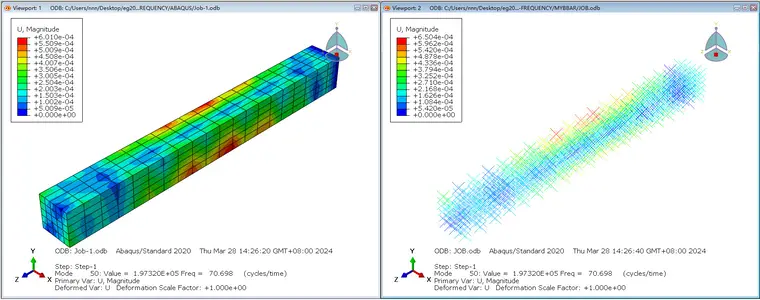
第50阶振型如下图:
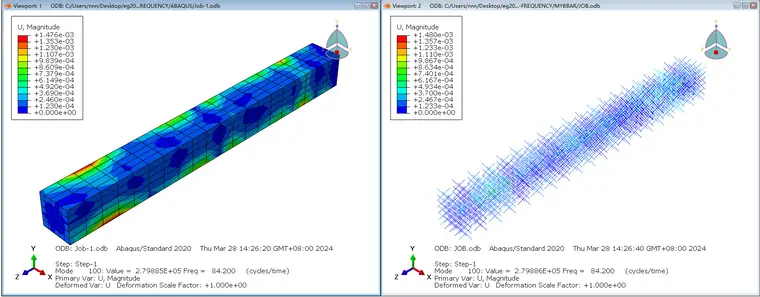
第100阶振型如下图:
(四)动力隐式分析
给悬臂端节点集合施加简谐荷载,荷载示意如下图:
简谐荷载曲线如下图:
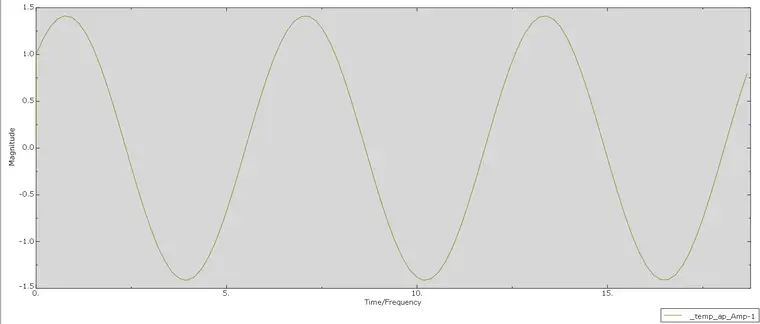
INP文件定义为:
*Amplitude, name=Amp-1, definition=PERIODIC 1, 1., 0., 0. 1., 1.
荷载幅值为:1e6,即:
*Cload, amplitude=Amp-1 Part-1-1.forced, 2, -1e+06
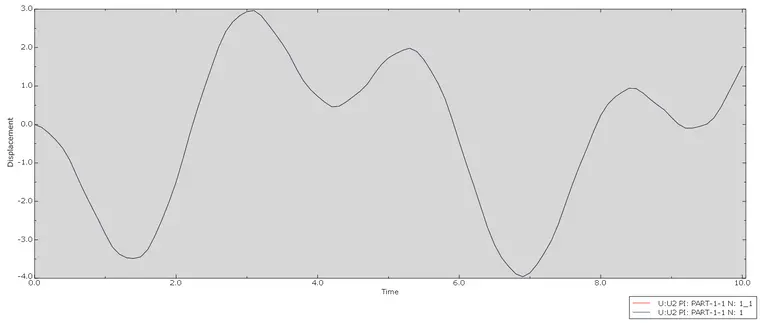
悬臂端角点加载向(U2)位移时程曲线如下图:
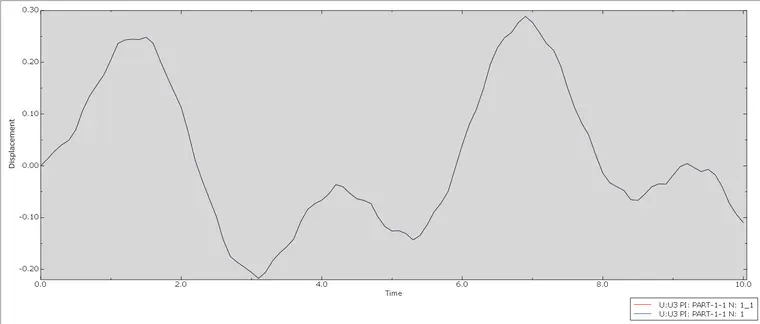
悬臂端角点轴向(U3)位移时程曲线如下图:
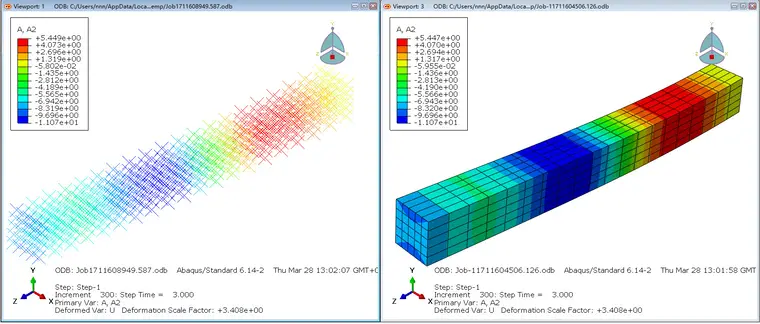
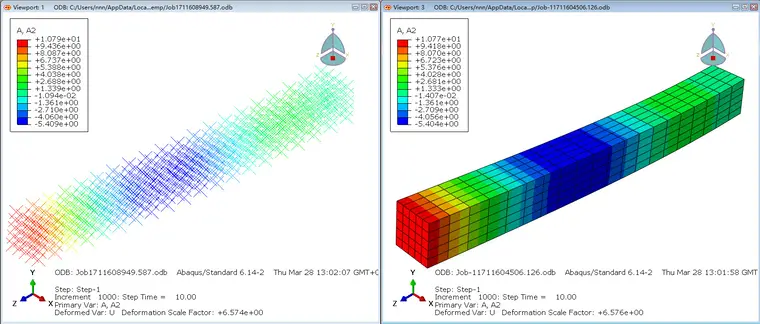
第3s加载向加速度云图如下图:
第7s加载向加速度云图如下图:
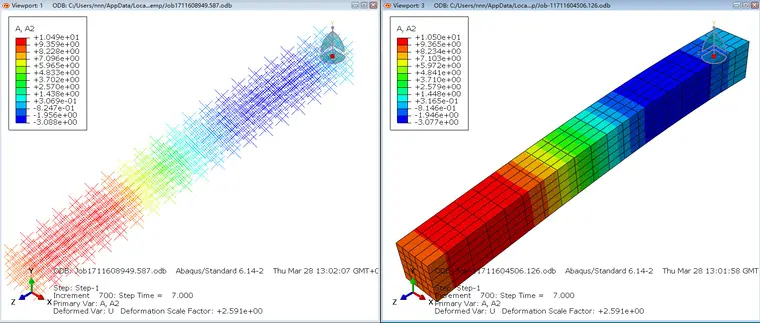
第10s加载向加速度云图如下图:
(五)结语
该UEL的BBAR修正部分,参考了帖子:https://www.jishulink.com/post/05a24d5b-ca1d-4206-861d-633f702a80d7。
得到了发帖者的帮助。向发帖者表示感谢!
(六)附件
---------------------
---------------------
BEAM-STATIC
ABAQUS
JOB-1.INP
MO.INP
RUN.BAT
MYBBAR
BBAR-STD.OBJ
JOB.INP
MO.INP
RUN.BAT
---------------------
BEAM-FREQUENCY
ABAQUS
JOB-1.INP
MO.INP
RUN.BAT
MYBBAR
BBAR-STD.OBJ
MO.INP
RUN.BAT
---------------------
BEAM-LOAD-DYNAMIC
ABAQUS
JOB-1.INP
MO.INP
RUN.BAT
MYBBAR
BBAR-STD.OBJ
JOB.INP
MO.INP
RUN.BAT
---------------------
---------------------



 微信
微信 QQ
QQ 微博
微博